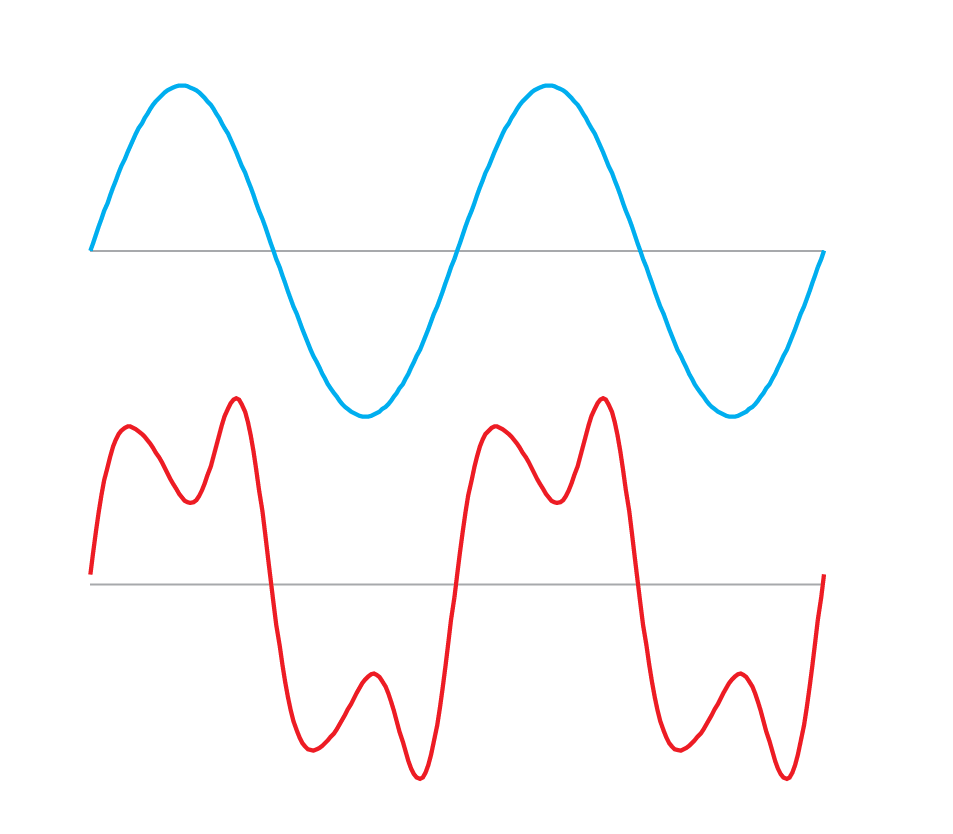
| Supponiamo di aver assegnato , a partire dalle specifiche di progetto , una W(s) desiderata per il sistema a ciclo chiuso e di aver calcolato, in base alle relazioni del paragrafo precedente, la F(s) che da luogo a tale f.d.t. Supponiamo che l’andamento in frequenza della F(s) così ottenuta sia quello indicato in figura 1: |
 |
| Essendo F(s)=P(s)*G(s) nel caso di reazione unitaria e F(s)=G(s)*P(s)*H(s) nel caso di reazione dinamica , anche il controllore G(s) resta automaticamente determinato. Poniamoci ad esempio nel caso di sintesi ad un grado di libertà ed andiamo a considerare la relazione fra i moduli delle f.d.t. in gioco: |
 |
| e a seconda del processo che dobbiamo controllare, ci possiamo trovare in una delle due seguenti situazioni : a) l’andamento di |P(jw)| , alle alte frequenze, si trova al di sopra di |F(jw)| ( curva verde in figura 2 ) , quindi G(s) ha un comportamento di tipo passa-basso ed è fisicamente realizzabile. b) l’andamento di |P(jw)| , alle alte frequenze , si trova al di sotto di |F(jw)| ( curva blu in figura 2 ) , quindi G(s) ha un andamento passa alto e non è fisicamente realizzabile. |
 |
Si dovrà quindi provvedere ad effettuare preventive verifiche sulla P(s) in modo da non trovarsi nella situazione di fisica irrealizzabilità , modificando eventualmente le aspettative sulla W(s) e/o sulla Wz(s) ( un ragionamento analogo a quello sulla G(s) vale infatti per la K(s) della sintesi a compensazione diretta ). Si può dimostrare che delle condizioni da rispettare per non trovarsi in questa situazione sono : 1)  per quanto riguarda la W(s) ; m ed n sono rispettivamente il grado del numeratore e del denominatore della funzione di trasferimento a ciclo chiuso , mentre mp ed np sono rispettivamente il grado del numeratore e del denominatore del processo , quindi tale condizione equivale a chiedere che l’eccesso poli-zeri della W(s) sia almeno pari all’eccesso poli-zeri del processo. per quanto riguarda la W(s) ; m ed n sono rispettivamente il grado del numeratore e del denominatore della funzione di trasferimento a ciclo chiuso , mentre mp ed np sono rispettivamente il grado del numeratore e del denominatore del processo , quindi tale condizione equivale a chiedere che l’eccesso poli-zeri della W(s) sia almeno pari all’eccesso poli-zeri del processo. 2)  per quanto riguarda la Wz(s) ; il significato fisico di tale condizione è evidente : non si può chiedere ad un sistema di controllo di attenuare ( |Wz(s)|<1 ) gli effetti del rumore a tutte le frequenze. per quanto riguarda la Wz(s) ; il significato fisico di tale condizione è evidente : non si può chiedere ad un sistema di controllo di attenuare ( |Wz(s)|<1 ) gli effetti del rumore a tutte le frequenze. |
Sommario completo degli appunti di Controlli Automatici:
Proprietà del Controllo in Controreazione
I requisiti di un sistema di controllo
La stabilità dei sistemi di controllo
La stabilità dei sistemi a ciclo chiuso
Come tracciare i diagrammi di Nyquist
Margine di fase e margine di guadagno
Sintesi di un sistema di Controllo di Tipo K
Sintesi diretta di un sistema a tempo continuo
Stabilità e fisica realizzabilità di un sistema di controllo progettato con la sintesi diretta